Project Resources
Hardware Architecture Diagram
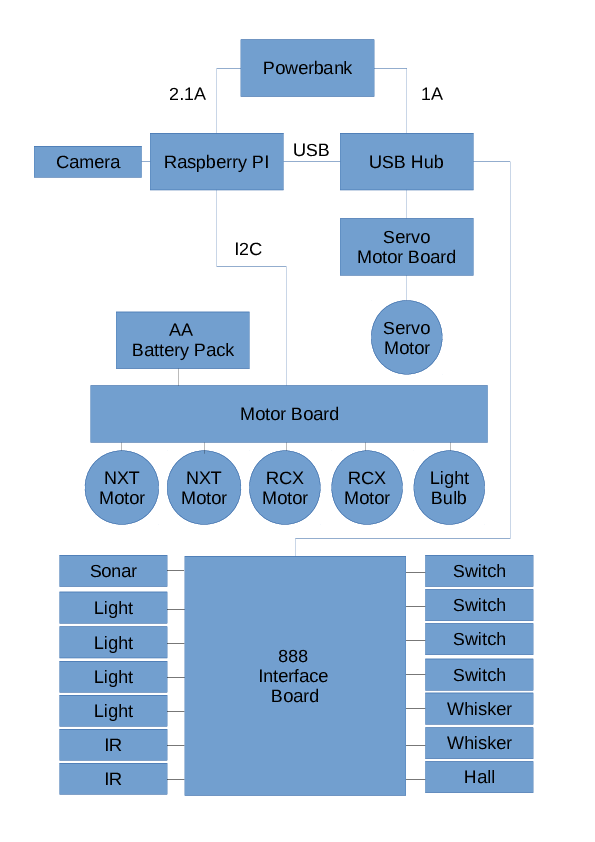
Hardware Wiring

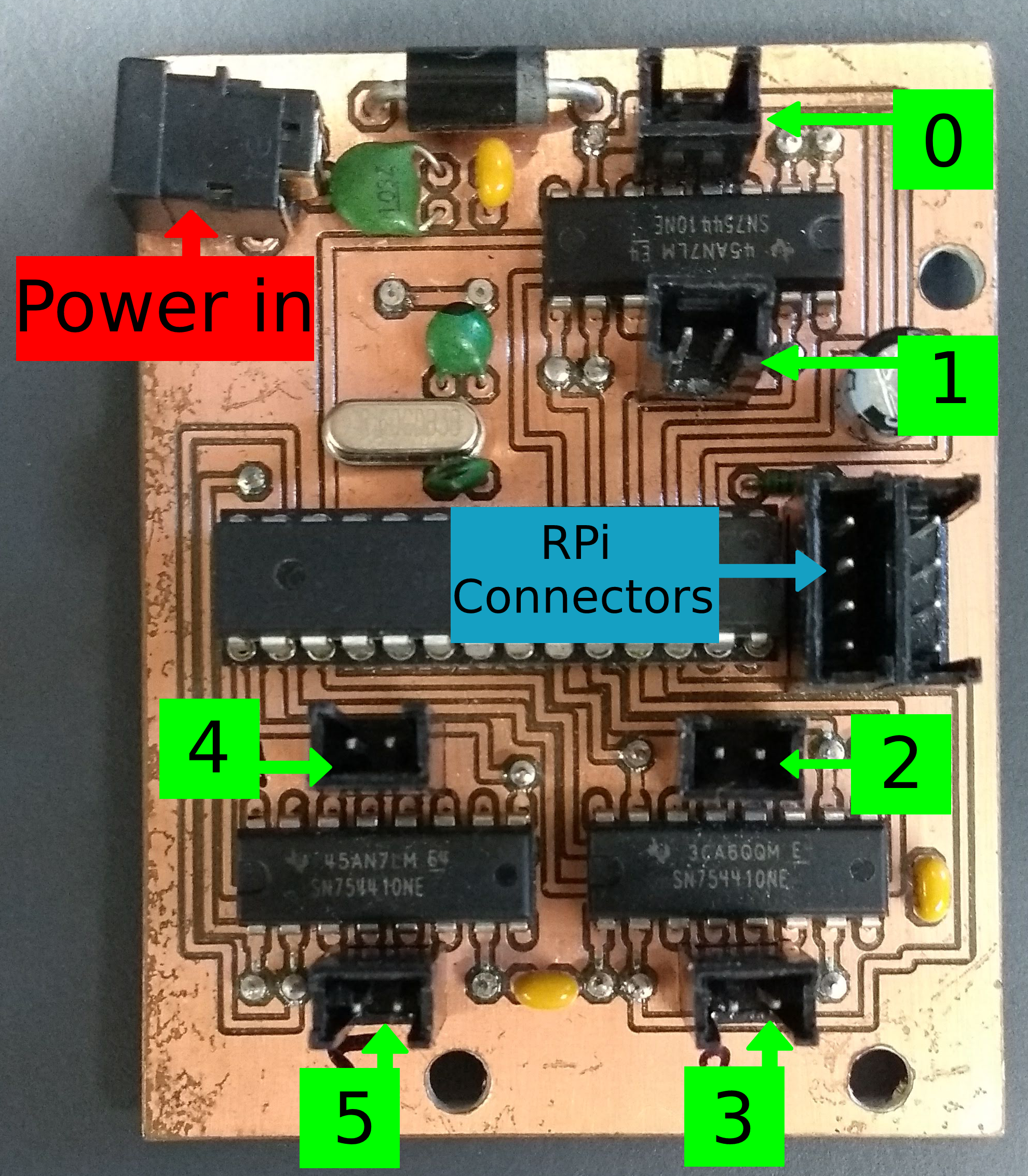
Motor Board Pin Numbering
To get Started With Python/Linux
- Python: Codecademy - https://www.codecademy.com/learn/learn-python
- Linux Command Line: https://www.codecademy.com/learn/learn-the-command-line
- Gearing:
- Lego Gears: http://sariel.pl/2009/09/gears-tutorial/
- Gear Ratios: https://www.wikihow.com/Determine-Gear-Ratio
Robot Building Essentials
Following links provide some basic tips and tricks when building robots using lego:
- Mechanical design (gears, bracing, …): http://www.cs.tufts.edu/comp/150IR/artoflego.pdf
- Gear trains and bracing: http://www.clear.rice.edu/elec201/Book/legos.html
- Gear trains and wheels: http://www.ecst.csuchico.edu/%7Ejuliano/csci224/Slides/03%20-%20Gears%20Pulleys%20Wheels%20Tires.pdf
- Motor characteristics: http://www.philohome.com/motors/motorcomp.htm
- Tips and tricks: http://homepages.inf.ed.ac.uk/gde/work/sdp/Robot_Construction_Guide.odt
- Gear ratio calculator: http://gears.sariel.pl
Arena 3d model
Click the preview below to enable the 3D WebGL viewer. When the 3D viewer has loaded, the world frame axes will be displayed: X-Y-Z are red, green, and blue, respectively. Regarding orientation, we will measure angles in degrees and with respect to the X-axis (theta, θ = 0°). This means that a robot looking towards the windows of the lab next to the arena will have θ = 90°.
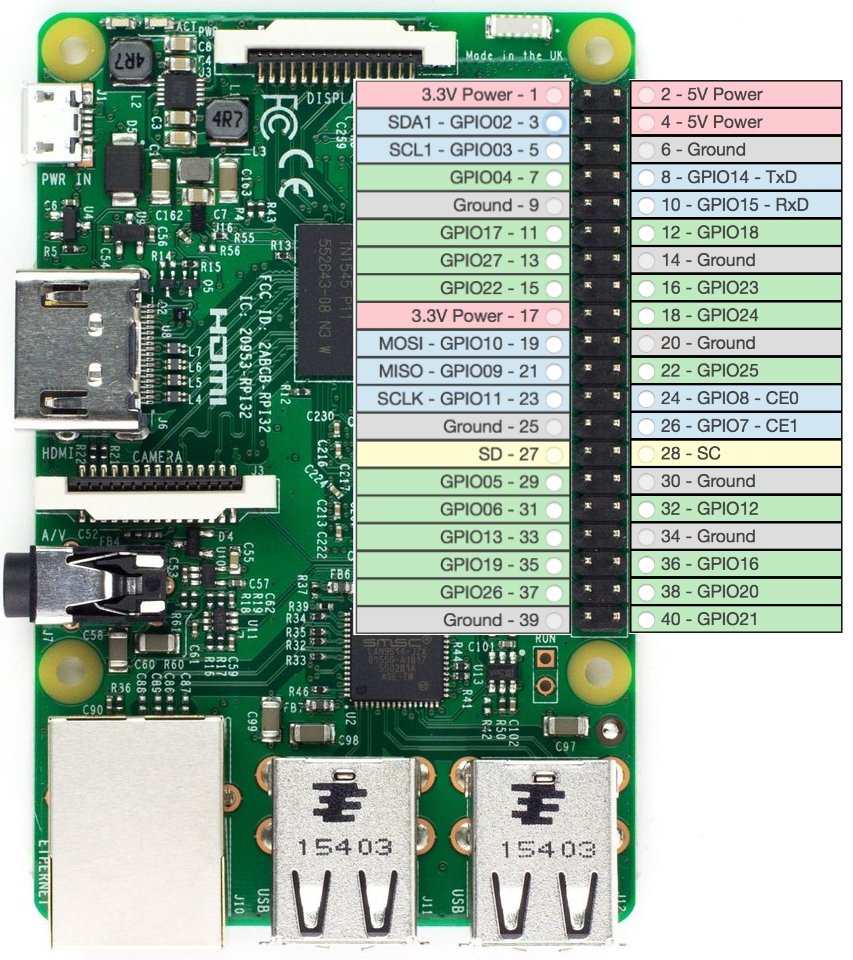
Raspberry Pi 3 Pinout
Hardware list
- Raspberry Pi
- Raspberry Pi Lego Case
- Raspberry Pi Camera (in the Lego Case)
- 16GB MicroSD Card
- Power Bank (Do not charge and use at the same time!)
- USB Hub, Externally Powered
- Motor Board
- 16 x AA Rechargable Batteries
- 2 x 8 Way Battery Holders
- Battery Charger
- Battery Tester
- Power Lead (Battery Pack to Motor Board)
- I2C Lead
- 2 x USB Micro Lead
- 1 x USB Plugtop Adapter
- 2 x USB Mini Lead
- 1 x USB B Lead
- 1 x Phidget 888 Assembly
- 2 x NXT Motors
- 2 x RCX Motors
- 2 x Whisker Sensors
- 4 x Lego Leads
- 2 x Lego Legacy Leads
- 4 x Microswitches
- 2 x Infrared Sensors
- 4 x Light Sensors
- 1 x Sonar Sensor
- 1 x Hall Effect Sensor
- 1 x Servo Motor
- 1 x Light Bulb